Working with Point Clouds (3D)
When dealing with Point Cloud processing and analysis, there are several components that provide you with the means to directly load and analyze point clouds, as well as to export result as raster images, such as DSM and DTM.
Loading and Creating Point Cloud Data
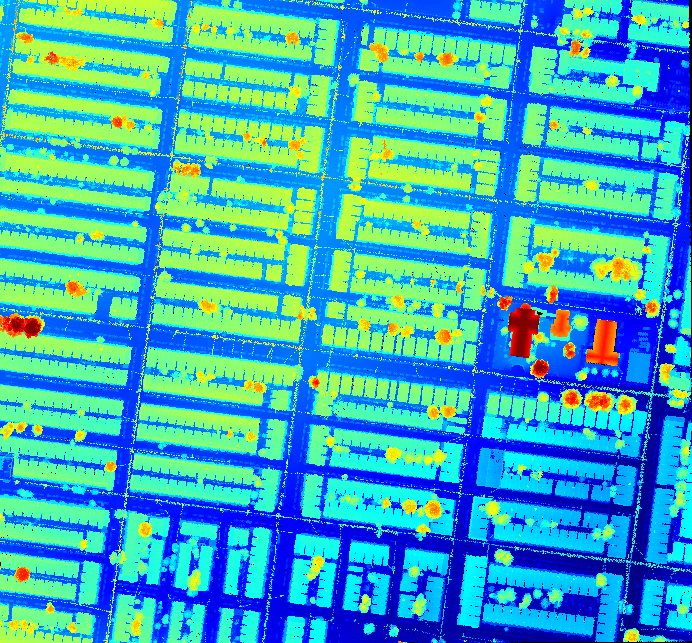
After loading, the point cloud is displayed in height rendering mode. To allow for quick display of the point cloud a rasterization is implemented in a simple averaging mode based on intensity values. This image layer can be activated in the View Settings dialog (with point cloud inactivated). Complex interpolation of the data can be done based on the Rasterize point cloud algorithm.

Create a new project using point cloud data
A) Select File > New Project
- This opens the Create Project dialog window with the Import Image Layers dialog
- Select the point cloud file(s) to open.
- You can set the resolution in which to load the point cloud file:
dialog Create Project > field Resolution (m/pxl) and press OK - Continue loading as with any other dataset.
In the loading process, a resolution must be set that determines the grid spacing of the raster image generated from the las file. The resolution is set to 1 by default, which is the optimal value for point cloud data with a point density of 1pt/m2. For data with a lower resolution, set the value to 2 or above; for higher-resolution data, set it to 0.5 or below.
B) In the View Settings dialog
- Select the point cloud layers in the windows explorer and drag and drop them to the View Settings dialog to import them.
- Continue loading as with any other dataset.
Working with Point Cloud Data
When working with point clouds, eCognition Developer uses the following approach:
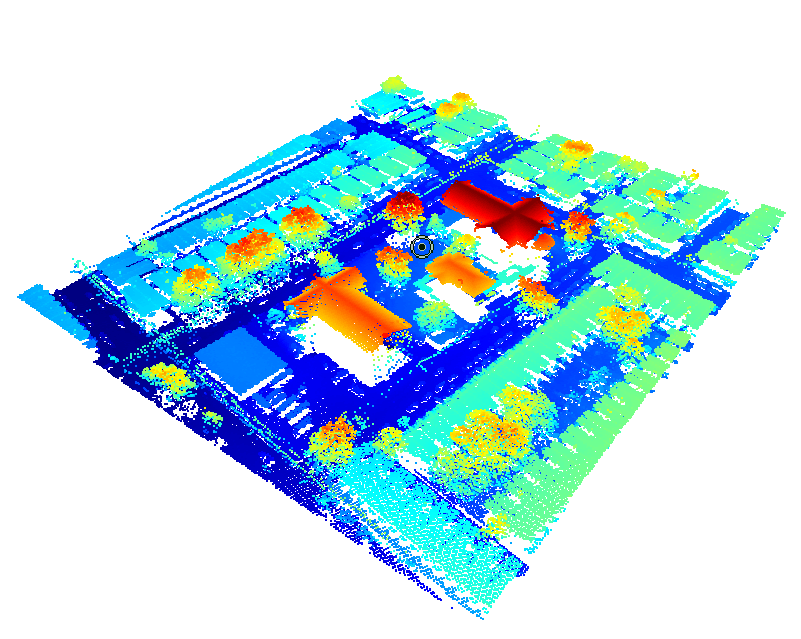
- Loaded point clouds are displayed in height rendering mode.
- Once loaded, activate the checkbox of the data to be shown in the View Settings dialog, e.g. the rasterized intensity (maximum intensity among all returns).
- Afterwards, to select a 3D subset activate the 3D subset button
 and draw a rectangle in the view (or alternatively select a non-parallel subset using View > Toolbars > 3D and select the 3 click 3D subset selection button to draw the rectangle).
and draw a rectangle in the view (or alternatively select a non-parallel subset using View > Toolbars > 3D and select the 3 click 3D subset selection button to draw the rectangle). - Additional raster or point cloud layers can be generated using the algorithms Rasterize point cloud or Create temporary point cloud (see
- When rasterizing a point cloud, gaps within the data can be interpolated using the Kernel parameter of the Rasterize point cloud algorithm or based on created image objects.
- Classification:
Point cloud points can be classified using eCognitions point cloud classification algorithms, e.g. Assign class to point cloud. According features are available in Feature view > Point cloud features.
Alternatively the raster layers can be classified using the standard classification algorithms (classification, assign class). For this approach the features based on '2D objects' are available in Feature view > Object features > Point cloud. In a last step the classification result can then be assigned back to the point cloud using algorithm assign class to point cloud. - Finally, results can be exported using algorithm export point cloud.
